

 联系我们
联系我们

1. ABB针对Scara机器人,有专门的MovePnP语句
2.指令MovePnP不支持反向执行。
3.指令MovePnP仅适用于SCARA机械臂
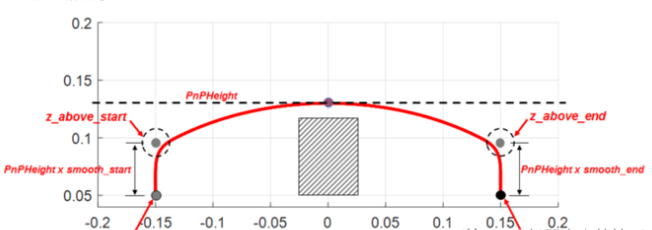
4. 代码轨迹如下图,pEnd为结束点
2.指令MovePnP不支持反向执行。
3.指令MovePnP仅适用于SCARA机械臂
4. 代码轨迹如下图,pEnd为结束点
5. 代码示例如下:
VAR num my_pnp_height:=130;
VARpnpdata my_pnpdata;
my_pnpdata.smooth_start:=50;
! 表示PnPHeight的开始高度的百分比例如50%,用于描述起点上方垂直移动的高度。
!一个较低的值可显著缩短循环时间。
my_pnpdata.smooth_end:=50;
!PnPHeight的百分比,例如50%,用于描述终点上方垂直移动的高度。
!一个较低的值可显著缩短循环时间。
MoveLpStart,v300,fine,tool0;
MovePnP pEnd,v300,\PnPHeight:=my_pnp_height,fine,tool0\PnPDataIN:=my_pnpdata;
!PnpHeight表示上图中机器人会经过的*高点,
! 该点为该运动语句对应坐标系下的**位置
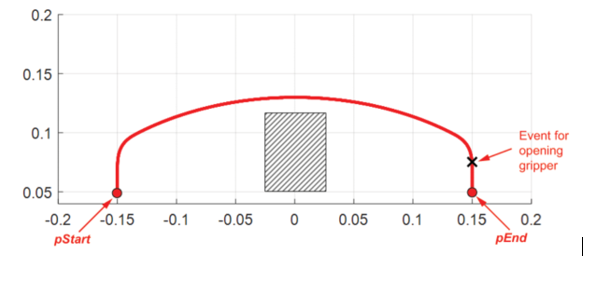
6. 对于快速移动中的快速控制I/O,示例代码如下:
VAR num my_pnp_height:=130;
VARpnpdata my_pnpdata;
my_pnpdata.smooth_start:=50;
! 表示PnPHeight的开始高度的百分比例如50%,用于描述起点上方垂直移动的高度。
!一个较低的值可显著缩短循环时间。
my_pnpdata.smooth_end:=50;
!PnPHeight的百分比,例如50%,用于描述终点上方垂直移动的高度。
!一个较低的值可显著缩短循环时间。
MoveLpStart,v300,fine,tool0;
MovePnP pEnd,v300,\PnPHeight:=my_pnp_height,fine,tool0\PnPDataIN:=my_pnpdata;
!PnpHeight表示上图中机器人会经过的*高点,
! 该点为该运动语句对应坐标系下的**位置
6. 对于快速移动中的快速控制I/O,示例代码如下:
VAR num my_pnp_height := 130;
VAR pnpdata my_pnpdata
VAR triggdata open_gripper;
my_pnpdata.smooth_start := 50;
my_pnpdata.smooth_end := 50;
TriggIO open_gripper, 25 \DOp:=doGripper, 0;
MoveL pStart, v300, fine, tool2;
MovePnP pEnd, v300, \PnPHeight:=my_pnp_height, fine, tool2\PnPDataIN:=my_pnpdata \PnPTrigg:=open_gripper \PnPTriggOption:=3;
!当TCP所在位置与pEnd的垂直距离为25 mm时,数字输出信号doGripper被设置为值0。
本文摘自:网络
想了解更多ABB产品及技术请点击:ABB变频器
VAR pnpdata my_pnpdata
VAR triggdata open_gripper;
my_pnpdata.smooth_start := 50;
my_pnpdata.smooth_end := 50;
TriggIO open_gripper, 25 \DOp:=doGripper, 0;
MoveL pStart, v300, fine, tool2;
MovePnP pEnd, v300, \PnPHeight:=my_pnp_height, fine, tool2\PnPDataIN:=my_pnpdata \PnPTrigg:=open_gripper \PnPTriggOption:=3;
!当TCP所在位置与pEnd的垂直距离为25 mm时,数字输出信号doGripper被设置为值0。
本文摘自:网络
想了解更多ABB产品及技术请点击:ABB变频器
